flowchart LR
drugInjection("drug injection") --> C1
subgraph CentralCompartment["central compartment"]
C1["C<sub>1</sub><br/>V<sub>1</sub>"]
end
subgraph PeripheralCompartment["peripheral compartment"]
C2["C<sub>2</sub><br/>V<sub>2</sub>"]
end
C1 -->|k1| C2
C2 -->|k2| C1
C1 -->|ke| Elimination
style CentralCompartment rect
style PeripheralCompartment rect
Dynamical models
Aaron Meyer (based on slides from Bruce Tidor)
Ordinary Differential Equations
- ODE models are typically most useful when we already have an idea of the system components
- As opposed to data-driven approaches when we don’t know how to connect the data
- Incredibly powerful for making specific predictions about how a system works
- Limits of these approaches:
- Results can be extremely sensitive to missing components or model errors
- Can quickly explode in complexity
- May rely on variables that are impossible to measure
Applications of ODE models
Molecular kinetics
Remember BE 110!
Let’s say we have two ligands that dimerize, then this dimer binds to a receptor as one unit:
\[ L_f + L_f \leftrightarrow L_D \]
\[ L_D + R_f \leftrightarrow R_b \]
If we want to know about how these species interact, we can model their behavior with the rate equations:
BOARD
Pharmacokinetics
Applications of ODE models: Pharmacokinetics
- Central compartment corresponds to the plasma in the body.
- \(V_1\) is the distribution volume of plasma in the body.
- \(C_1\) is the concentration of drug in the plasma.
- Peripheral compartment represents a group of organs that significantly take up the particular drug.
- \(V_2\) is the volume of these group of organs.
- \(C_2\) is the concentration of drug in the group of organs.
Applications of ODE models: Pharmacokinetics
- \(k_e\) is the rate constant for clearance.
- \(k_e C_1 V_1\) is the mass of drug/time that’s cleared.
- \(k_1\) is the rate constant for mass transfer from the central to peripheral compartment.
- \(k_1 C_1 V_1\) is the mass of drug/time that transfers from the central to peripheral compartment.
- \(k_2\) is the rate constant for mass transfer from the peripheral to central compartment.
- \(k_2 C_2 V_2\) is the mass of drug/time that transfers from the peripheral to the central compartment.
Applications of ODE models: Pharmacokinetics
- Have a bolus i.v. injection
- No drug in both compartments for \(t<0\)
- Total dose \(D\) (μg) administered at once at \(t=0\)
- Drug distribution occurs instantaneously in the central compartment.
- Also get well-mixed instantaneously.
- Concentration in central compartment at \(t=0\) is \(C_1(0) = D/V_1\) μg/mL
- No chemical reactions in the compartment
Applications of ODE models: Population kinetics
Lotka-Volterra Equations
- Prey population \(x\), predator population \(y\):
\[\dot{x} = \alpha x - \beta x y\]
\[\dot{y} = \delta x y - \gamma y\]
- \(\alpha\): prey birth rate; \(\beta\): predation rate per encounter
- \(\gamma\): predator death rate; \(\delta\): predator growth per prey consumed
Types of Analysis
Note about difference from other models we’ve covered
- ODE models can be part of inference techniques just as elsewhere
- But we often don’t have a symbolic expression of the answer
- Have to simulate the model every time
- Can only focus on the input-output we get from the black box
- In this respect, what we do with ODE models will be very similar to what you could do with any computational simulation
Analytic vs Numerical Modeling
Analytic
- Wider range of parameters
- Avoid numerical problems
- Physical intuition more direct
- Often must simplify model
Numerical
- Can handle complex models
- Dependence on parameters & initial conditions
- Physical insight may be difficult to extract
- Convergence, numerical stability
Analytic vs Numerical Modeling
Reality often requires handling in between:
- Use analytic treatment to study entire parameter space
- Use numerical treatment to study interesting regions
- Use both to handle complex behavior
Stability Analysis
- Can solve for steady-states of a system \[\frac{dF}{dt} = 0\]
- Results of this can be both stable or unstable points
- With stable points, slope of \(\frac{dF}{dt}\) is negative
- In multivariate case, this means eigenvalues of Jacobian are negative
- Steady-state points aren’t necessarily realistic or feasible!
- NNLSQ can solve for points
- Only simulating system ensures they are accessible
Linear vs. Nonlinear Systems
- Linear models are easier to simulate and understand than non-linear
- Linearity: If \(\mathbf{x}_1\) and \(\mathbf{x}_2\) are both solutions, then \(c_1 \mathbf{x}_1 + c_2 \mathbf{x}_2\) is also a solution
- Linear systems tend to be separable (effective decoupling)
- Non-linear systems exhibit interesting properties
Linearity & Separability

Phase Portraits
\[ \dot{\vec{x}} = \vec{f}(\vec{x}) \]

Non-linear systems
- No general analytic approach to finding trajectory
- So, goal is to understand qualitative trajectory behavior
Features in Phase Portraits

Solving a Set of Equations for Phase Portrait
- Numerical computation
- i.e., Runge-Kutta integration
- Qualitative
- Sufficient for some purposes
- Analytic/symbolic
- Elegant, though not always tractable
Step 1: Find the fixed points

Step 2: Determine stability of fixed points
- If the systems moves slightly away from each fixed point, will it return or will it move further away?
- Another way to ask the same question is to ask whether, as time approaches infinity, does the system tend toward or away from a given stable point.
- Note \(y\) solution must be of form:
- \(y = y_0 e^{-t}\) (because \(\dot{y} = \frac{dy}{dt} = -y\))
- So \(y \rightarrow 0\) for \(t \rightarrow \infty\)
- Thus, \(\dot{x} = x + e^{-y}\) becomes \(\dot{x} \rightarrow x + 1\) for long times
- This has exponentially growing solutions
- Toward \(\infty\) for \(x > -1\) and \(-\infty\) for \(x < -1\)
Solution grows exponentially in at least one dimension, so it is unstable.
Step 3: Sketch nullclines
Nullclines are the sets of points for which \(\dot{x} = 0\) or \(\dot{y} = 0\), so flow is either horizontal or vertical.
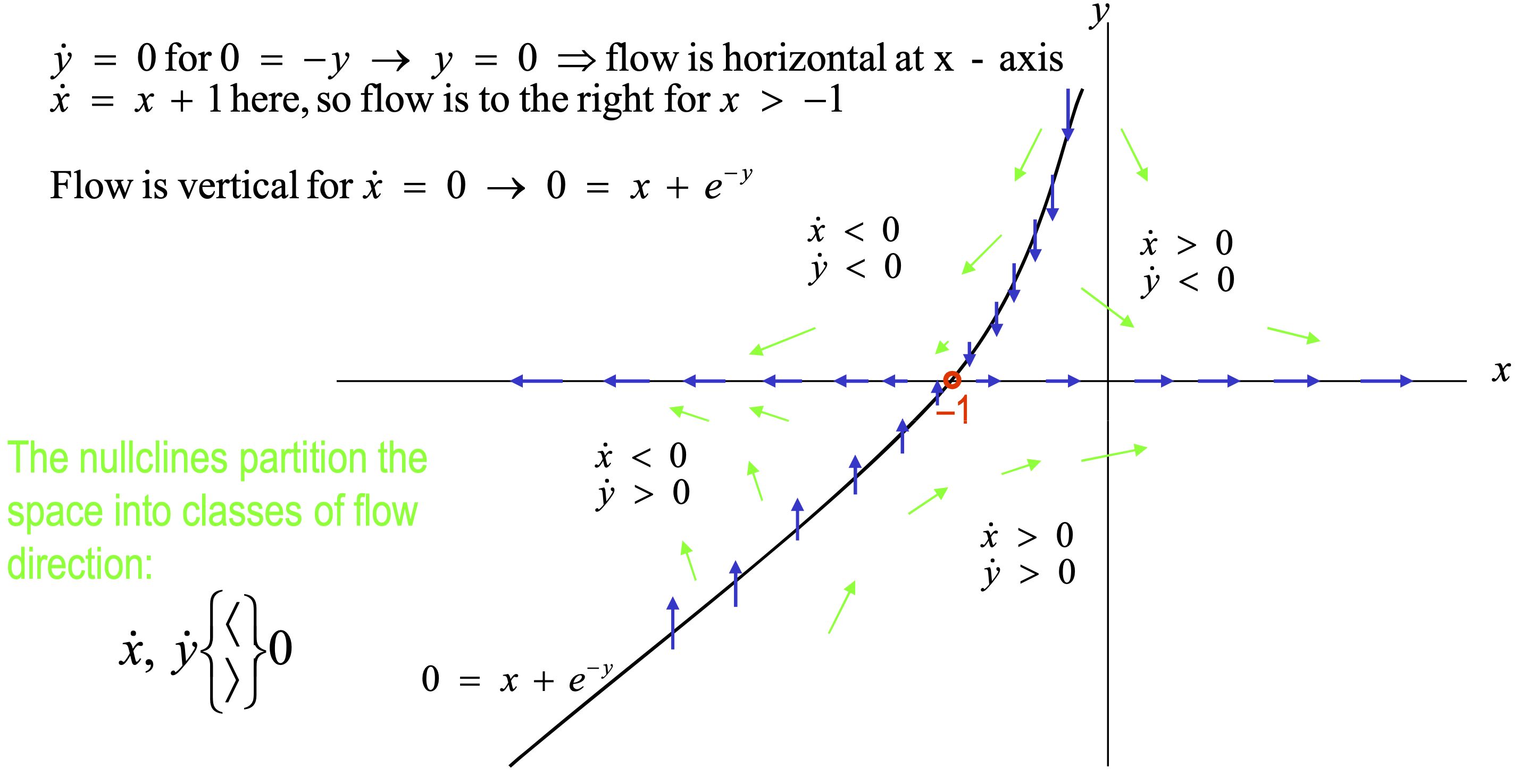
Step 4: Plot flow lines

Existence & Uniqueness
Non-linear \(\dot{\mathbf{x}} = f(\mathbf{x})\) and given an initial condition.
- Existence and uniqueness of solution guaranteed if \(f\) is continuously differentiable
- Corollary: Trajectories do not intersect, because if they did, then there would be two solutions for the same initial condition at the crossing point
Linearization About Fixed Points

Solving Linearized Systems

Example

More Examples

Classification of Fixed Points

Eigenvalue Behavior Summary
| Eigenvalues | Fixed Point Type | Behavior |
|---|---|---|
| Real, both negative | Stable node | Trajectories converge to fixed point |
| Real, both positive | Unstable node | Trajectories diverge from fixed point |
| Real, opposite signs | Saddle point | Stable in one direction, unstable in another |
| Complex, negative real part | Stable spiral | Oscillatory decay toward fixed point |
| Complex, positive real part | Unstable spiral | Oscillatory divergence from fixed point |
| Purely imaginary | Center | Neutral closed orbits (undamped oscillation) |
Relevance for Nonlinear Dynamics
- So, we have said that we can find fixed points of nonlinear dynamics, linearize about each fixed point, and characterize the dynamics about each fixed point in the non-linear model by the corresponding linear model.
- Is this always true? Do the nonlinearities ever disturb this approach?
- A theorem can be proven which states
- That all the regions on the previous slide are “robust” (nodes, spirals, saddles) and correspond between linear and nonlinear models.
- But that all the lines on the previous slide are “delicate” (centers, stars, degenerate nodes, non-isolated fixed points) and can have different behaviors in linear and non-linear models.
Bifurcations
- The phase portraits we have been looking at describe the trajectory of the system for a given set of initial conditions. However, for “fixed” parameters (rate constants in eqns, for instance).
- What we might like is a series of phase portraits corresponding to different sets of parameters.
- Many will be qualitatively similar. The interesting ones will be where a small change of parameters creates a qualitative change in the phase portrait (bifurcations).
- What we will find is that fixed points & closed orbits can be created/destroyed and stabilized/destabilized.
Saddle-Node Bifurcation

- Canonical example: \(\dot{x} = r + x^2\)
- For \(r < 0\): two fixed points (one stable, one unstable)
- At \(r = 0\): the two fixed points collide and annihilate
- For \(r > 0\): no fixed points — system escapes to infinity
Hopf Bifurcation
- A Hopf bifurcation occurs when a fixed point changes stability and a limit cycle (sustained oscillation) is born or destroyed
- Eigenvalues of \(J\) cross the imaginary axis as a parameter varies
- Common in biological oscillators: circadian rhythms, cell cycle checkpoints, neural firing
Example: Genetic Control Network
Genetic Control Network
The Griffith model is a canonical example of a saddle-node bifurcation giving rise to bistability — two coexisting stable steady states separated by an unstable one. Griffith (1971) model of genetic control:
- x = protein concentration
- y = mRNA concentration

Genetic Control Network
Biochemical version of a bistable switch:
- Only stable points are no protein and mRNA or a fixed composition
- If degradation rates too great, only stable point is origin

Implementation
Testing
- Many properties one can test
- Mass balance
- Changes upon parameter adjustment
- Good to test these before and after integration
Python Packages
SciPy provides several interfaces for ODE solving:
- scipy.integrate.solve_ivp — recommended modern interface
- scipy.integrate.odeint — legacy, widely used in existing code
- scipy.integrate.ode — low-level interface
Notes:
- All can solve stiff and non-stiff equations.
scipy.integrate.odeexposes multiple backends; useset_integratorto select (e.g.,'vode','lsoda').solve_ivpuses themethodargument instead (default'RK45'; use'Radau'or'BDF'for stiff systems).
Code Example: Pendulum Oscillation
The second order differential equation for the angle \(\theta\) of a pendulum acted on by gravity with friction can be written:
\[\theta''(t) + b*\theta'(t) + c*\sin(\theta(t)) = 0\]
where b and c are positive constants, and a prime (‘) denotes a derivative. To solve this equation with odeint, we must first convert it to a system of first order equations. By defining the angular velocity \(\omega(t) = \theta'(t)\), we obtain the system:
\[\theta'(t) = \omega(t)\]
\[\omega'(t) = -b*\omega(t) - c*\sin(\theta(t))\]
Pendulum Oscillation
Let y be the vector \([\theta, \omega]\). We implement this system in python as:
We assume the constants are \(b = 0.25\) and \(c = 5.0\):
Pendulum Oscillation
For initial conditions, we assume the pendulum is nearly vertical with \(\theta(0) = \pi - 0.1\), and it initially at rest, so \(\omega(0) = 0\). Then the vector of initial conditions is
We generate a solution 101 evenly spaced samples in the interval \(0 \leq t \leq 10\). So our array of times is:
Pendulum Oscillation
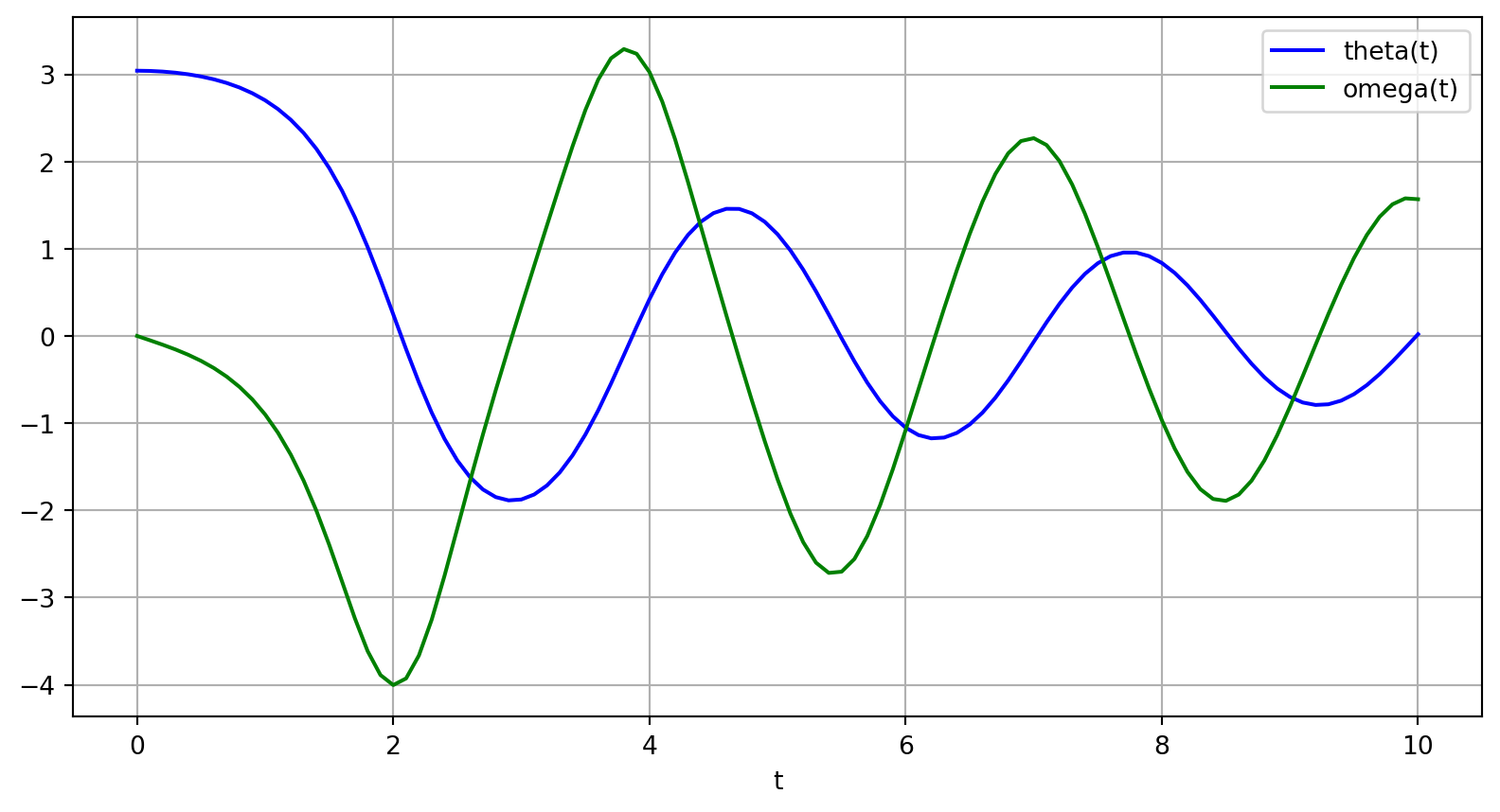
Call odeint to generate the solution. To pass the parameters b and c to pend, we give them to odeint using the args argument.
The solution is an array with shape (101, 2). The first column is \(\theta(t)\), and the second is \(\omega(t)\). The following code plots both components.
Pendulum Oscillation
Pendulum Oscillation
Analysis Example: The Cell Cycle
Consider a simple model of cells transitioning between two phases of the cell cycle:
graph LR
G1[G1 Phase] -->|α| G2S[G2/S Phase]
G2S -->|β| G1
G1 -->|γ| Death[Death]
G2S -->|γ| Death
style G1 fill:#f9d5e5,stroke:#333,stroke-width:2px
style G2S fill:#a1e7e6,stroke:#333,stroke-width:2px
style Death fill:#f8b195,stroke:#333,stroke-width:2px
Can this model oscillate under physically meaningful situations and, if so, when?
Implementation Note: Stiff Systems
- Very roughly, most ODE solvers take steps inversely proportional to the rate at which the state is changing
- For systems where there are two processes operating on differing timescales, this can be problematic
- If everything happens really fast, the system will come to equilibrium quickly
- If everything is slow, you can take longer steps
- A typical biological example: receptor–ligand binding equilibrates in milliseconds, while downstream transcriptional responses occur over hours — a \(10^6\)-fold difference in timescale
- Stiff solvers additionally require the Jacobian matrix
- This very roughly allows them to keep track of these differences in timescales
odeintcan automatically find this for you- Sometimes it’s faster/better to provide this as parameter
Dfun
- Sometimes it’s faster/better to provide this as parameter
- For stiff problems with
solve_ivp, prefermethod='Radau'ormethod='BDF'
Fitting ODE Models to Data
- ODE models have no closed-form solution in general — must simulate to evaluate the likelihood
- Fitting is an outer optimization loop around numerical integration:
- Can constrain to oscillatory solutions by checking eigenvalues of \(J\) at steady state
- Oscillation requires eigenvalues with nonzero imaginary part
Machine Learning as a Dynamical System
Optimization as a Discrete-Time ODE
- Every iterative ML optimizer is a discrete-time dynamical system
- State vector: model parameters \(\theta_t\) (and, for adaptive optimizers, auxiliary moment estimates)
- Update rule: \(\theta_{t+1} = \theta_t - \eta \, g_t\) (analogue of an Euler integration step)
- The learning rate \(\eta\) plays the role of the integration step size
- Too small: slow convergence (fine-grained but inefficient)
- Too large: oscillation or divergence — exactly as in stiff ODE solvers
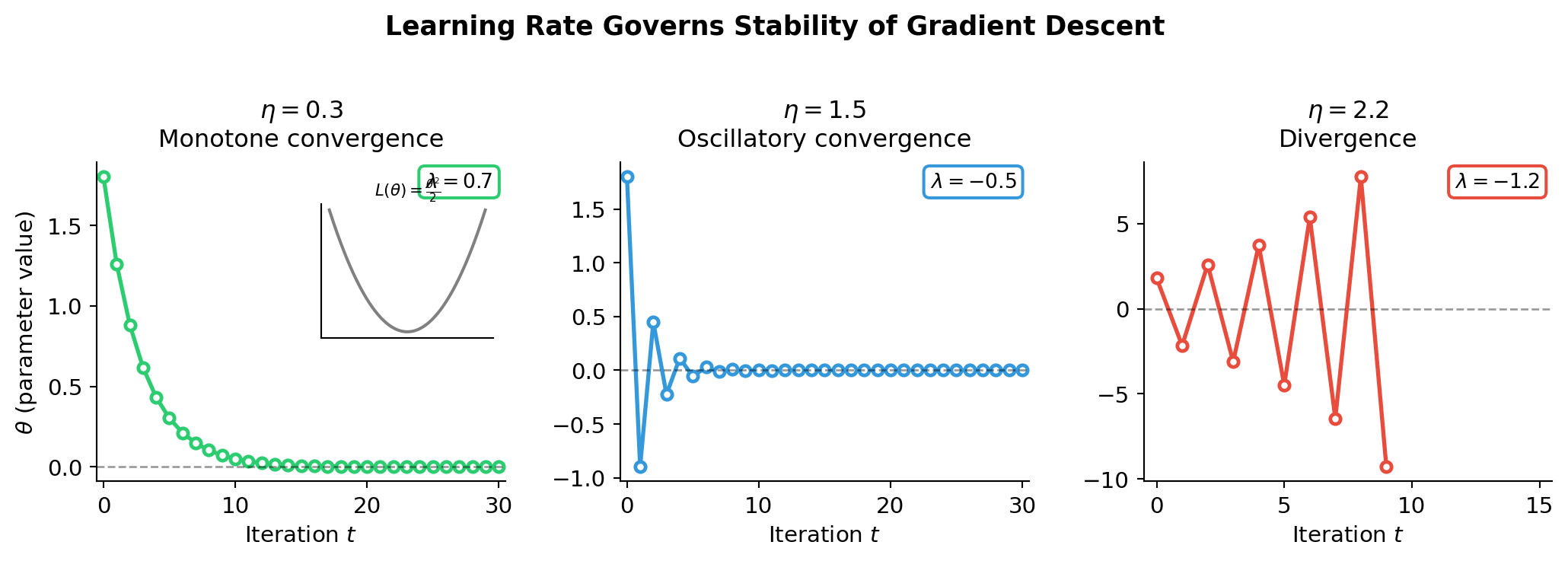
Stability Analysis of Gradient Descent
For a quadratic loss \(L(\theta) = \frac{1}{2}\theta^T H \theta\), the gradient descent update is:
\[\theta_{t+1} = (I - \eta H)\,\theta_t\]
The discrete eigenvalues are \(\lambda_i = 1 - \eta h_i\), where \(h_i\) are eigenvalues of the Hessian \(H\).
| Eigenvalue \(\lambda_i\) | Fixed-Point Type | Behavior |
|---|---|---|
| \(0 < \lambda < 1\) | Stable node | Monotone convergence |
| \(-1 < \lambda < 0\) | Stable spiral | Oscillatory convergence |
| \(\lambda < -1\) | Unstable | Divergence |
| \(\lambda = 0\) | Dead-beat | Converges in one step |
Stability Analysis of Gradient Descent
Stability requires \(0 < \eta < \frac{2}{h_\text{max}}\) — controlled entirely by the largest Hessian eigenvalue.
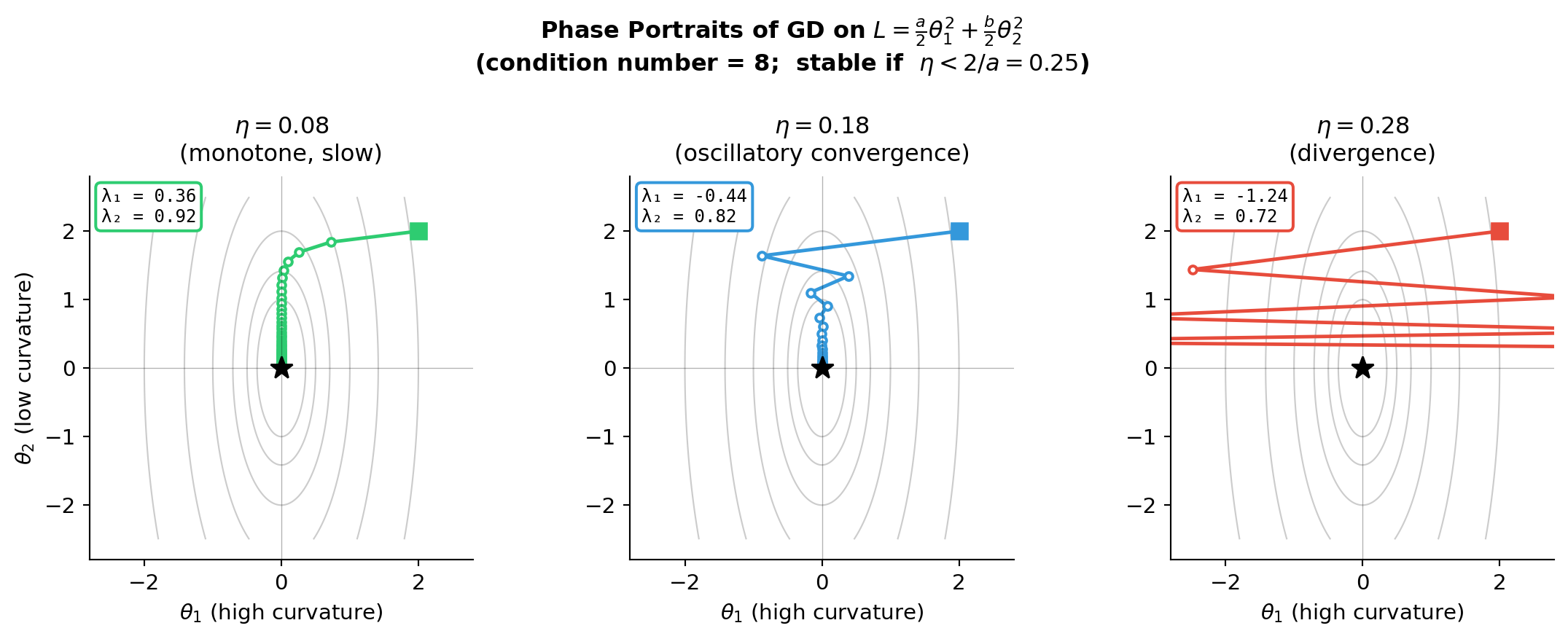
The Condition Number Problem
- Realistic loss surfaces have Hessian eigenvalues spanning many orders of magnitude (ill-conditioned)
- For \(L(\theta) = \frac{a}{2}\theta_1^2 + \frac{b}{2}\theta_2^2\) with \(a \gg b\):
- Stability requires \(\eta < 2/a\) — set by the stiff direction
- The slow direction \(\theta_2\) then requires \(\sim \frac{a}{b}\) more steps to converge
The Condition Number Problem
- This is precisely the stiff ODE problem: fast and slow timescales coexist
- Just as stiff ODE solvers need the Jacobian, adaptive optimizers track local curvature
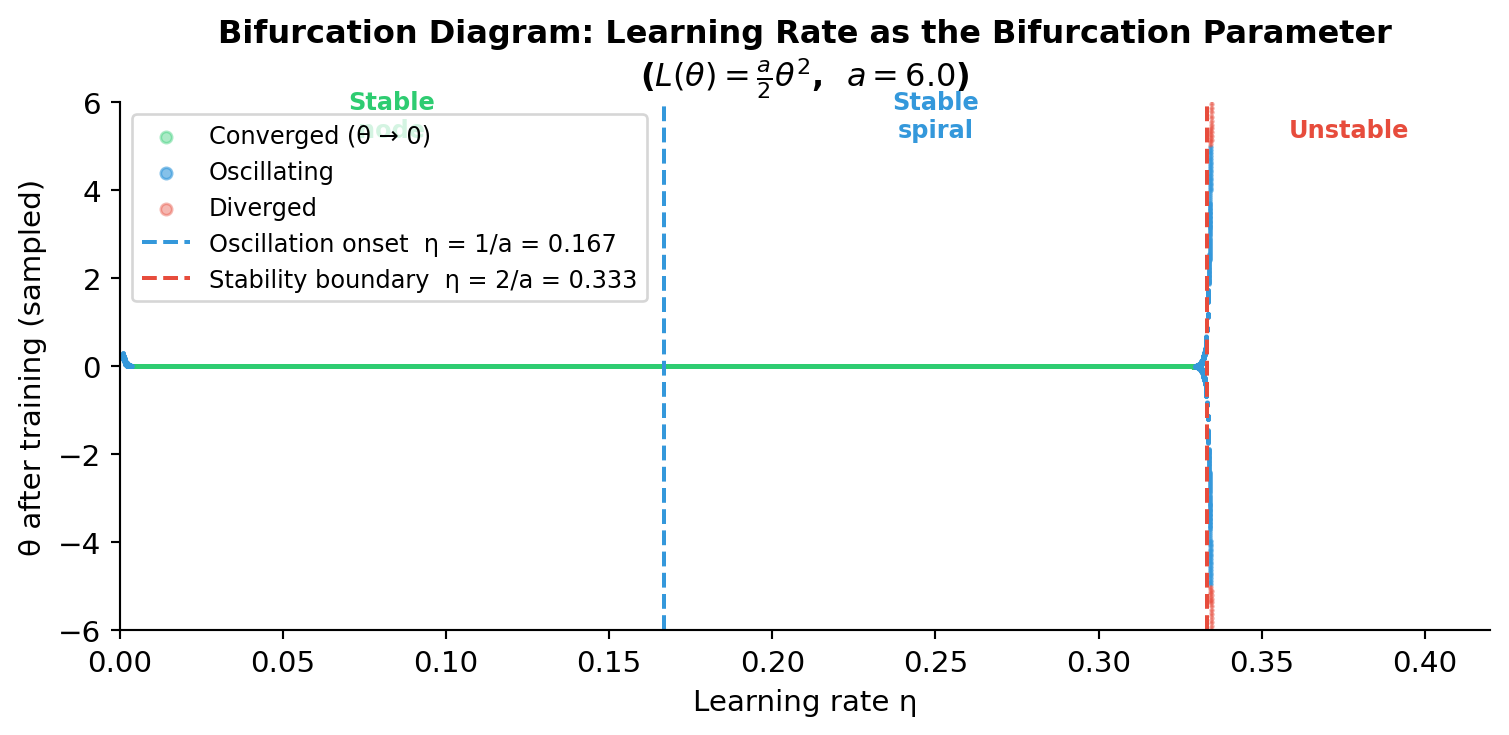
Learning Rate as a Bifurcation Parameter
- As \(\eta\) increases past \(1/h_\text{max}\), the fixed point changes from a stable node to a stable spiral — a bifurcation
- Past \(2/h_\text{max}\): the fixed point becomes unstable — training diverges
- This is structurally identical to the bifurcations we studied for ODE systems
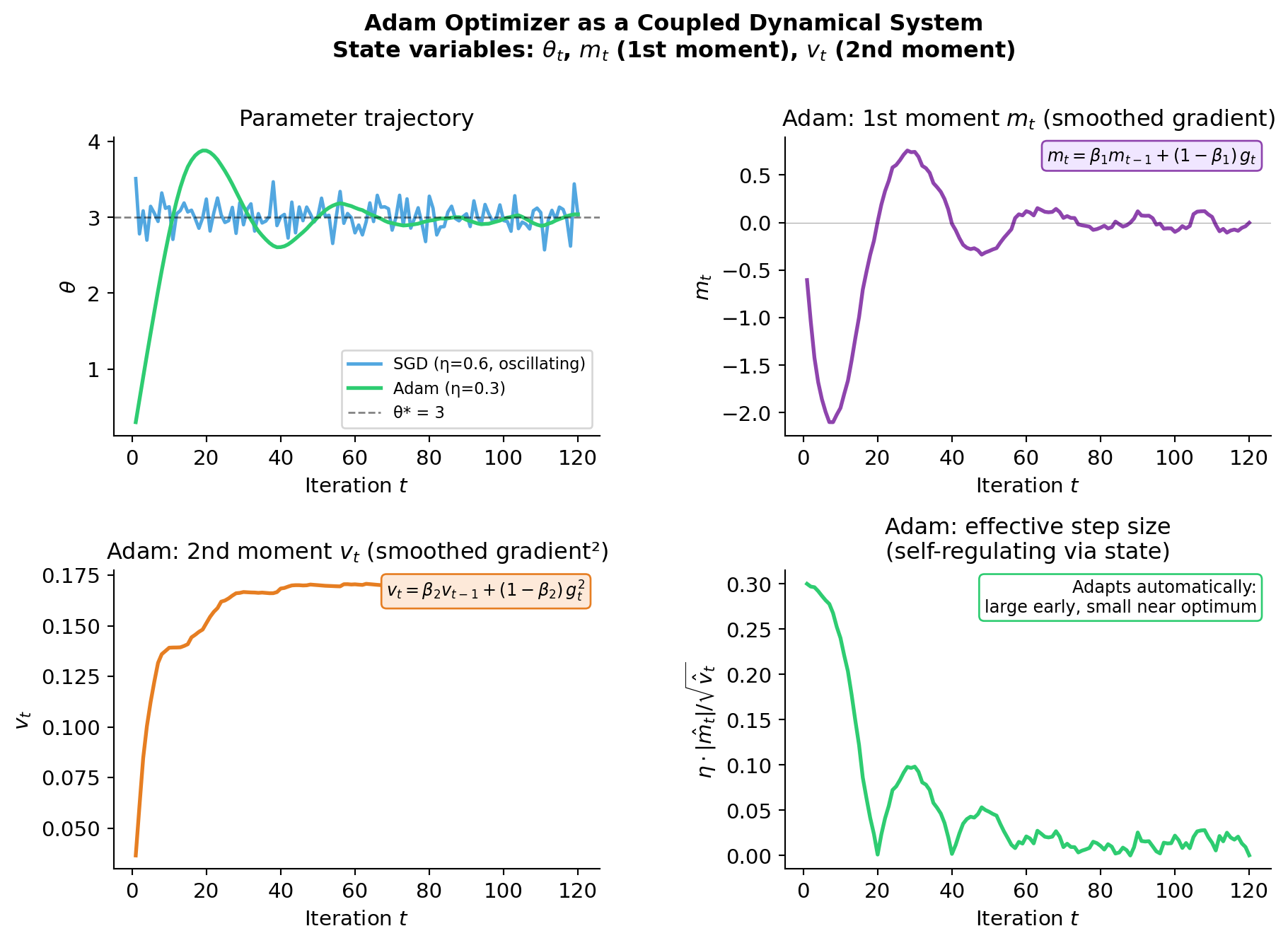
Adam as a Coupled Dynamical System
Adam maintains three state variables — exactly like an ODE system with three coupled equations:
\[m_t = \beta_1 m_{t-1} + (1-\beta_1)\,g_t \qquad \text{(1st moment — smoothed gradient)}\]
\[v_t = \beta_2 v_{t-1} + (1-\beta_2)\,g_t^2 \qquad \text{(2nd moment — smoothed curvature)}\]
\[\theta_t = \theta_{t-1} - \eta \, \frac{\hat{m}_t}{\sqrt{\hat{v}_t} + \varepsilon} \qquad \text{(parameter update)}\]
- \(m_t\) and \(v_t\) are state variables with their own dynamics (exponential moving averages)
- \(\beta_1, \beta_2\) are decay constants — analogous to rate constants in ODE models
- The effective step size \(\eta / \sqrt{v_t}\) adapts to local curvature, making Adam more robust to ill-conditioning than SGD
Adam as a Coupled Dynamical System
Reading & Resources
- 💾: scipy.linalg.expm
- 💾: scipy.integrate.odeint
- 📖: Steven Strogatz, Nonlinear Dynamics and Chaos
- 📄: Kingma & Ba, Adam: A Method for Stochastic Optimization (2014)
- 📄: Ahn et al., SGD with Large Step Sizes Learns Sparse Features (2022) — connects large-η oscillations to implicit regularization
Review Questions
- What is the steady-state solution to an ODE model? How do you solve for them?
- What is a phase-space diagram?
- What property of ODE models ensures that solutions can never cross in phase space?
- What is a Jacobian matrix? How do you calculate it from an ODE system?
- What is the behavior of an ODE system if its eigenvalues are all positive and real? How about negative and real?
- What is the behavior of an ODE system if all its eigenvalues are imaginary and positive? How about imaginary and negative?
- What does it mean if the eigenvalues of an ODE system give conflicting answers (e.g. one is real and negative, the other is real and positive)?
- How can you fit an ODE model to a series of measurements over time?
- How could you constrain an ODE system so that you only consider parameter values that have oscillation?
- Why does gradient descent on an ill-conditioned loss surface converge slowly? What do adaptive optimizers like Adam do to address this?